人工智能在自動駕駛中的應(yīng)用與相關(guān)軟件開發(fā)
自動駕駛技術(shù),作為人工智能領(lǐng)域最具代表性的應(yīng)用之一,正以前所未有的速度重塑未來交通。它并非單一技術(shù)的突破,而是依賴于一系列復(fù)雜的人工智能算法的協(xié)同工作。從環(huán)境感知到?jīng)Q策規(guī)劃,再到精準(zhǔn)控制,人工智能技術(shù)貫穿了自動駕駛的每個核心環(huán)節(jié)。
一、 人工智能在自動駕駛中的核心應(yīng)用
- 環(huán)境感知與理解: 這是自動駕駛的“眼睛”和“大腦”的基礎(chǔ)。通過車載傳感器(如攝像頭、激光雷達(dá)、毫米波雷達(dá)、超聲波雷達(dá))采集海量環(huán)境數(shù)據(jù),人工智能算法,特別是計(jì)算機(jī)視覺和深度學(xué)習(xí)模型,負(fù)責(zé)對這些數(shù)據(jù)進(jìn)行融合與解析。例如,卷積神經(jīng)網(wǎng)絡(luò)(CNN)能夠精準(zhǔn)識別和分類車輛、行人、交通標(biāo)志、車道線等關(guān)鍵目標(biāo);多傳感器融合算法能構(gòu)建出車輛周圍環(huán)境的精確三維模型,實(shí)現(xiàn)360度無死角感知。
- 高精度定位與地圖構(gòu)建: 結(jié)合GPS、慣性導(dǎo)航單元(IMU)和實(shí)時感知數(shù)據(jù),AI算法(如基于深度學(xué)習(xí)的視覺SLAM)可以實(shí)現(xiàn)厘米級的高精度定位。車輛采集的數(shù)據(jù)可用于構(gòu)建和實(shí)時更新高精度地圖,為路徑規(guī)劃提供關(guān)鍵靜態(tài)環(huán)境信息。
- 決策與路徑規(guī)劃: 這是自動駕駛的“智慧”所在。基于強(qiáng)化學(xué)習(xí)、深度強(qiáng)化學(xué)習(xí)以及各種預(yù)測模型,AI系統(tǒng)需要模擬人類駕駛員的決策過程。它不僅要規(guī)劃出從A點(diǎn)到B點(diǎn)的最優(yōu)路徑,還要在瞬息萬變的動態(tài)環(huán)境中,實(shí)時做出安全、高效、舒適的駕駛決策,例如跟車、超車、避障、并線等。決策算法需要綜合考慮交通規(guī)則、乘員舒適度、行車效率等多重目標(biāo)。
- 車輛控制: 決策指令最終需要通過車輛的控制系統(tǒng)(線控系統(tǒng))來執(zhí)行。AI控制算法(如模型預(yù)測控制MPC)負(fù)責(zé)將規(guī)劃好的軌跡轉(zhuǎn)化為精確的油門、剎車和方向盤控制信號,確保車輛平穩(wěn)、準(zhǔn)確地沿著預(yù)定軌跡行駛。
二、 人工智能應(yīng)用軟件開發(fā)的關(guān)鍵環(huán)節(jié)
支撐上述應(yīng)用的,是一套龐大而復(fù)雜的軟件工程體系,其開發(fā)過程極具挑戰(zhàn)。
- 數(shù)據(jù)驅(qū)動的開發(fā)范式: 自動駕駛AI模型的性能極度依賴數(shù)據(jù)。軟件開發(fā)流程始于大規(guī)模數(shù)據(jù)采集與標(biāo)注,構(gòu)建覆蓋各種場景(日/夜、晴/雨/雪、城市/高速)的高質(zhì)量數(shù)據(jù)集。隨后是模型訓(xùn)練、驗(yàn)證與測試的迭代循環(huán)。開發(fā)團(tuán)隊(duì)需要構(gòu)建高效的數(shù)據(jù)管理平臺和自動化訓(xùn)練流水線。
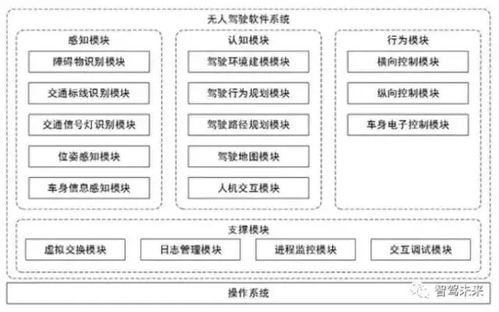
- 軟件架構(gòu)與中間件: 自動駕駛系統(tǒng)通常采用模塊化、分層的軟件架構(gòu),如感知、規(guī)劃、控制等模塊解耦。ROS(機(jī)器人操作系統(tǒng))或其企業(yè)級變體(如ROS 2、Apollo Cyber RT)常被用作核心中間件,負(fù)責(zé)處理模塊間復(fù)雜的通信、調(diào)度和數(shù)據(jù)同步,確保系統(tǒng)的實(shí)時性與可靠性。
- 仿真測試與驗(yàn)證: 由于實(shí)車測試成本高昂且存在安全風(fēng)險,基于AI的仿真測試平臺成為軟件開發(fā)的關(guān)鍵工具。開發(fā)者可以在虛擬世界中創(chuàng)建海量、極端、危險的駕駛場景,對算法進(jìn)行高效、安全的測試和驗(yàn)證,加速開發(fā)迭代,證明系統(tǒng)的安全邊界。
- 安全與合規(guī)框架: AI軟件必須嵌入功能安全(如ISO 26262)和預(yù)期功能安全(SOTIF)的設(shè)計(jì)理念。開發(fā)過程需要嚴(yán)格的代碼規(guī)范、模型魯棒性測試、冗余與失效應(yīng)對機(jī)制,并確保系統(tǒng)的決策過程盡可能可解釋、可追溯,以滿足未來法規(guī)的合規(guī)要求。
三、 挑戰(zhàn)與未來展望
盡管取得了巨大進(jìn)展,挑戰(zhàn)依然存在:長尾場景(罕見但危險的 corner cases)的處理、AI模型的可解釋性與安全性、多智能體(車與車、車與路)協(xié)同決策、以及高昂的研發(fā)與部署成本。
人工智能在自動駕駛中的應(yīng)用軟件開發(fā)將朝著更強(qiáng)大的端到端學(xué)習(xí)能力、更高效的模型壓縮與車載部署(邊緣計(jì)算)、以及車路云一體化的協(xié)同智能方向發(fā)展。軟件開發(fā)的核心也將從單一算法創(chuàng)新,轉(zhuǎn)向構(gòu)建完整、可靠、可大規(guī)模量產(chǎn)的系統(tǒng)工程解決方案。人工智能不僅是自動駕駛的技術(shù)引擎,其自身的應(yīng)用開發(fā)過程,也正在推動著軟件工程方法論向著數(shù)據(jù)驅(qū)動、仿真優(yōu)先、安全至上的新范式演進(jìn)。
如若轉(zhuǎn)載,請注明出處:http://www.zjcmlsx.cn/product/70.html
更新時間:2026-05-30 07:24:21